AC SERVO MOTOR - CẤU TẠO, NGUYÊN LÝ HOẠT ĐỘNG VÀ ỨNG DỤNG


- Ngày đăng: 20-05-2021
AC Servo Motor là 1 động cơ xoay chạy điện 3 pha, hoạt động dựa trên nguyên lý nam châm vĩnh cửu như các loại động cơ trong quạt hay máy bơm. Động Cơ AC Servo khác với những động cơ thông thường khác là nó được tích hợp nhiều công cụ điện tử và cảm biến để truyền thông tin và điều khiển như: Bộ khuếch đại, bộ mã hóa, bộ điều khiển và màn hình. Những điều này tăng độ chính xác và dễ dàng điều khiển hơn, là một trong những yêu cầu quan trọng trong sản xuất công nghiệp hiện nay.
Vậy chúng ta cùng tìm hiểu Động Cơ AC Servo là gì?
AC Servo Motor Là Gì?
Động Cơ AC Servo khác với những động cơ thông thường khác là nó được tích hợp nhiều công cụ điện tử và cảm biến để truyền thông tin và điều khiển như: Bộ khuếch đại, bộ mã hóa, bộ điều khiển và màn hình. Những điều này tăng độ chính xác và dễ dàng điều khiển hơn, là một trong những yêu cầu quan trọng trong sản xuất công nghiệp hiện nay.
Cấu Tạo Của Động Cơ Servo AC
AC Servo Motor được cấu tạo từ 3 bộ phận chính:
- Bộ Điều Khiển
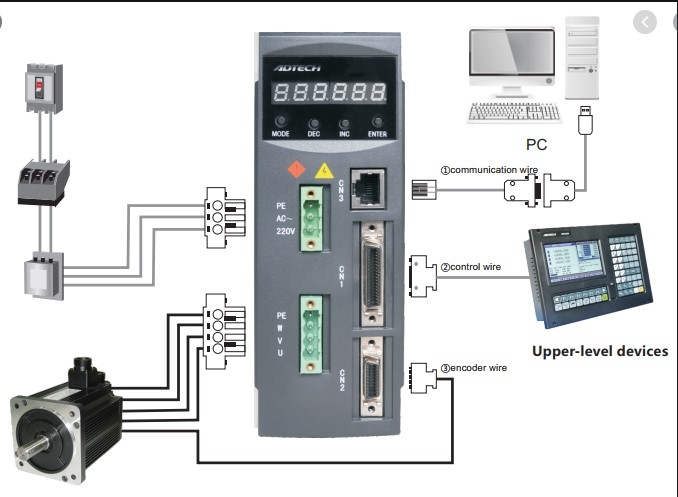
- Bộ Khuếch Đại Servo
- Thiết Bị Dò Và Dẫn Động
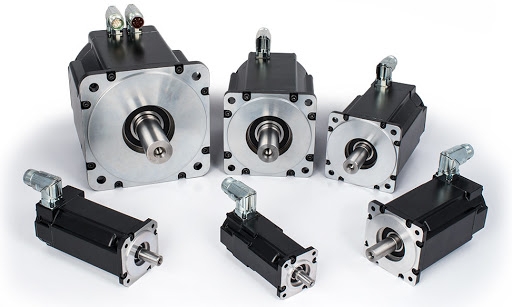
Động cơ của nó được cấu tạo từ Rotor và Stator, bao gồm cuộn dây dẫn thứ cấp (nhôm hoặc đồng), nam châm, phanh điện từ, trục dẫn động hoạt động theo nguyên lý ứng dụng nam châm vĩnh cữu. Bộ mã hóa hay còn gọi là Encoder sẽ tiếp nhận thông tin từ động cơ rồi chuyển về dạng mã hóa (code) sau đó truyền đi để xử lý và ngược lại. Động Cơ AC Servo còn có thể được trang bị thêm phanh tái sinh để giảm tốc độ khi cần và tái sinh dòng điện để sử dụng, là loại ưu việt nhất trên thị trường về tiết kiệm điện năng.
Nguyên Lý Hoạt Động Của Động Cơ AC Servo
AC Servo Motor hoạt động theo nguyên tắc PWM (Điều chế độ rộng xung), có nghĩa là góc quay của nó được điều khiển bởi thời lượng của xung được áp dụng cho mã PIN điều khiển của nó. Về cơ bản, động cơ Servo được tạo thành từ động cơ DC được điều khiển bởi một điện trở thay đổi (Chiết áp) và một số bánh răng.
Khi máy ra lệnh đầu vào theo vị trí của trục. Nếu tín hiệu phản hồi khác với đầu vào đã cho, tín hiệu lỗi sẽ cảnh báo người dùng. Bộ khuếch đại chuyển tín hiệu này và áp dụng làm đầu vào cho động cơ và làm động cơ quay. Khi trục đạt đến vị trí yêu cầu, tín hiệu trở về 0, khi đó động cơ đứng yên giữ vị trí.
Đầu vào lệnh ở dạng xung điện. Vì đầu vào thực tế của động cơ là sự khác biệt giữa tín hiệu phản hồi (vị trí hiện tại) và tín hiệu yêu cầu, do đó tốc độ của động cơ tỷ lệ thuận với chênh lệch giữa vị trí hiện tại và vị trí cần thiết. Lượng điện năng mà động cơ yêu cầu tỷ lệ thuận với quãng đường cần di chuyển.
Động cơ được kết hợp với Encoder để cung cấp phản hồi vị trí và tốc độ. Nói một cách đơn giản, chúng ta chỉ đo vị trí. Sau đó, vị trí đo của đầu ra được so sánh với vị trí lệnh, đầu vào bên ngoài để điều khiển. Nếu vị trí đầu ra khác với vị trí đầu ra dự kiến, tín hiệu lỗi sẽ tạo ra. Điều này làm cho động cơ quay theo một trong hai hướng, vì cần phải đưa trục đầu ra đến vị trí thích hợp. Khi vị trí đến gần, tín hiệu lỗi giảm xuống không. Cuối cùng động cơ dừng lại.
Động Cơ Ac Servo là một hệ thống điều khiển vòng kín, sử dụng thông tin phản hồi vị trí nhằm điều khiển các chuyển động. Bạn cứ thử nghỉ xem, nếu bạn đang dùng động cơ Servo cho việc cắt kim loại chẳng hạn, khi dao cắt kim loại chạm vào khối thép cần cắt sẽ nhận lại phản lực từ khối thép làm cho việc cắt chính xác trở nên khó khăn, sản phẩm sẽ bị lỗi. Nhờ có Encoder và bộ khuếch đại, thông tin nhận được về phản lực sẽ lập tức được truyền đi và xử lý, sau đó tăng thêm tần số cho động cơ hoạt động mạnh hơn, việc này dường như không có độ trễ. Việc này được gọi là điều khiển hồi tiếp, giúp cho các AC Servo Motor có thể tự động điều khiển chính xác.
Có 3 chế độ điều khiển động cơ: Tốc độ, vị trí và moment, cần cài đặt tùy theo mục đích sử dụng động cơ.
Ngoài ra, mỗi AC Servo Motor chỉ tương thích với 1 Driver của chính hãng đó thì mới có thể hoạt động được. Khi xãy ra hư hỏng động cơ, ví dụ như cháy cuộn dây( thường thấy ở các động cơ dùng nam châm) sẽ không thể tự ý quấn lại dây được vì như vậy sẽ làm sai với thông số của hảng sản xuất. Tốt nhất, khi gặp hư hỏng bạn nên mang động cơ của mình đi gặp nhà sản xuất để được bảo hành hoặc liên hệ với các công ty chuyên lắp đặt và bảo hành và sửa chữa.
Các Thương Hiệu Servo Motor

AC Servo Delta được tích hợp công nghệ từ thương hiệu nổi tiếng Delta Electronics. Dòng AC Servo này sở hữu những bộ phận, linh kiện chất lượng cao, cùng với đó là những thông số rất gần gũi với đại đa số người sử dụng. Bởi vậy AC Servo Delta được biết đến với độ ổn định cao, nhanh chóng trong tốc độ xử lý công việc. Sản phẩm còn có thể thực hiện nhiều những chức năng như tự động chống nhiễu, tự động dò tìm thông số ở Ethercat cấp cao.
Ưu điểm của sản phẩm AC Servo Delta chính là đa dạng kiểu dáng, mẫu mã, vẻ ngoài đẹp mắt, độ bền cơ khí khá cao, chất lượng hoàn hảo, vượt trội. Đồng thời mức giá của sản phẩm là rất cạnh tranh trên thị trường trong nước nên được ưa chuộng và sử dụng rộng rãi so với nhiều dòng AC Servo khác. Có thể nói rằng, hãng Delta đã tạo nên chất lượng, uy tín và thương hiệu AC Servo.
AC Servo Mitsubishi
Servo Mitsubishi có nhiều loại động cơ (động cơ xoay, tuyến tính và dẫn động trực tiếp) để đạt được hiệu suất hoạt động của máy tốt nhất.
Động Cơ Servo Mitsubishi MR-JE là dòng Servo kinh tế, đang được sử dụng khá nhiều hiện nay. MR-JE hỗ trợ kết nối SSCNET III/H giúp hệ thống đáp ứng được với tốc độ cao. Encoder độ phân giải cao 17 bit (131072ppr). Tốc độ vòng quay tối đa 5000 rpm. có khả năng nhận lệnh xung 500khz. Có 3 chế độ điều khiển là vị trí, tốc độ và momen. Ngoài ra đây là một dòng sản phẩm tiết kiệm năng lượng của Mitsubishi giúp giảm tối đa chi phí cho người sử dụng, nâng cao hiệu suất công việc.
Động Cơ Servo Mitsubishi MR-J4 Series là dòng Servo mới nhất của Mitsubishi với nhiều tính năng vượt trội. Dòng Servo này mang lại hiệu quả cao nhờ tốc độ bus mạng SSCNET III/H III/H 0.222 ms, 0.444 ms, 0.888 ms nhanh hơn gấp 3 lần so với những giải pháp cũ. Dễ kết nối hơn và giảm tối đa năng lượng tiêu thụ nhờ nguồn năng lượng tái tạo. Số trục có thể điều khiển tối đa lên tới 3 trục. Độ phân giải Encoder lên tới 22 bit (4 triệu xung mỗi vòng quay). Tốc độ tối đa lên tới 6000rpm. Có 3 chế độ điều khiển là vị trí, tốc độ và momen.
Động Cơ Servo Mitsubishi MR-J3 là dòng Servo Mitsubishi cao cấp với độ chính xác cao và nhiều tính năng ưu việt. Bộ điều khiển tốc độ cao với tần số đáp ứng lớn 2100Hz, Encoder độ phân giải lên tới 18 bit (262144 P/rev). Có khả năng tự động nhận diện động cơ Servo, tăng cường tốc độ đáp ứng cũng như nâng thêm dải tốc độ và momen cho động cơ. Đấu nối dây Servo Mitsubishi MR-J3 đơn giản (Plug & Play).
Động Cơ Servo Mitsubishi MR-J2S là dòng Servo Mitsubishi cơ bản, đáp ứng được hầu hết các yêu cầu của 1 ứng dụng cần dùng Servo. Nguồn điện cấp cung cấp 1/3 pha 220Vac, 3 pha 380vac, độ phân giải Encoder 17-bit, có đủ 3 chế độ điều khiển vị trí, tốc độ, momen. Tốc độ vòng quay tối đa 6000 rpm, có khả năng kết nối mạng CC-Link hoặc SSCNET
AC Servo Yaskawa
Động Cơ AC Servo Yaskawa Sigma-5 mang lại hiệu quả cao nhất trong ngành công nghiệp do độ đáp ứng tần số chưa từng có, giảm tối đa thời gian cài đặt và điều khiển chính xác hơn. Ngoài ra, AC Servo Yaskawa Sigma-5 cài đặt nhanh hơn, điều chỉnh đơn giản hơn, và giảm thiểu rung động. Có thể tùy chọn nhiều loại model và nhiều phụ kiện, Sigma-5 đáp ứng mọi yêu cầu ứng dụng khác nhau.
Động Cơ AC Servo Yaskawa Sigma-7 là dòng sản phẩm được thiết kế với tính năng vượt trội,hoạt động với tốc độ cao,độ chính xác tuyệt đối & độ tin cậy tối đa. Dòng sản phẩm này đáp ứng mạnh mẽ nhu cầu của thị trường ngày nay đối với cả nhà chế tạo máy và khách hàng đầu cuối trong ngành sản xuất. Sigma-7 mang lại hiệu suất rất lớn cho các nhà máy đóng gói, sản xuất chất bán dẫn, chế biến gỗ và máy in kỹ thuật số.
Ứng Dụng Của Đông Cơ Servo AC
Động Cơ Servo nhỏ nhưng rất quan trọng để sử dụng trong các ứng dụng yêu cầu điều khiển vị trí chính xác. Dưới đây là một số ứng dụng phổ biến hơn được sử dụng hiện nay.
- Điều khiển vị trí
Một loại servo phổ biến có hỗ trợ điều khiển vị trí. Thông thường, các cơ cấu servo có thể là điện, thủy lực hoặc khí nén. Chúng hoạt động trên nguyên lý phản hồi âm, trong đó đầu vào điều khiển được so sánh với vị trí thực tế của hệ thống cơ khí được đo lường bằng một số loại cảm biến tại đầu ra. Khoản chênh lệch giữa giá trị thực tế và giá trị mong muốn (một “tín hiệu sai số”) được khuếch đại (và chuyển đổi) và được dùng để điều khiển hệ thống theo hướng cần thiết để giảm hoặc loại bỏ sai số. Quá trình này là một trong những ứng dụng được sử dụng rộng rãi của lý thuyết điều khiển. Các servo điển hình có thể cung cấp một đầu ra là chuyển động tròn (góc quay) hoặc đầu ra chuyển động thẳng.
- Điều khiển tốc độ
Các ứng dụng khác
Các cơ cấu servo vị trí đầu tiên được sử dụng trong điều khiển hỏa lực quân sự và thiết bị điều hướng hàng hải. Ngày nay, Cơ cấu servo được sử dụng trong các máy công cụ tự động, ăng-ten theo dõi vệ tinh, máy bay điều khiển từ xa, hệ thống định vị tự động trên tàu thuyền và máy bay, và hệ thống điều khiển súng phòng không. Những ví dụ khác là những hệ thống điều khiển bay trong máy bay, sử dụng các servo để phát động các bề mặt điều khiển của máy bay, và các mô hình điều khiển bằng radio sử dụng các RC servo với cùng mục đích. Nhiều máy ảnh tự động lấy nét cũng sử dụng một cơ cấu servo để di chuyển các ống kính một cách chính xác. Một ổ đĩa cứng có một hệ thống servo từ tính với độ định vị chính xác đến micromet. Trong các máy móc công nghiệp, servo được sử dụng để thực hiện các chuyển động phức tạp, trong nhiều ứng dụng.
- Trong công nghiệp thực phẩm
Động cơ Ac Servo là một hệ thống điều khiển vòng kín, sử dụng thông tin phản hồi vị trí nhằm điều khiển các chuyển động. Bạn cứ thử nghỉ xem, nếu bạn đang dùng động cơ Servo cho việc cắt kim loại chẳng hạn, khi dao cắt kim loại chạm vào khối thép cần cắt sẽ nhận lại phản lực từ khối thép làm cho việc cắt chính xác trở nên khó khăn, sản phẩm sẽ bị lỗi. Nhờ có Encoder và bộ khuếch đại, thông tin nhận được về phản lực sẽ lập tức được truyền đi và xử lý, sau đó tăng thêm tần số cho động cơ hoạt động mạnh hơn, việc này dường như không có độ trễ. Việc này được gọi là điều khiển hồi tiếp, giúp cho các AC Servo Motor có thể tự động điều khiển chính xác.
- Máy in công nghiệp
- Máy cắt và tạo hình kim loại
- Dệt may
- Chế biến gỗ / CNC
Lịch Sử Hình Thành Và Phát Triển Động Cơ Servo
Hệ thống lái tàu thủy hỗ trợ là những ứng dụng đầu tiên sử dụng các cơ cấu servo để bảo bánh lái di chuyển đến vị trí mong muốn.
Thiết bị điều tốc động cơ hơi nước của James Watt thường được coi là hệ thống phản hồi thật sự đầu tiên. Các đuôi quạt cối xay gió là một ví dụ sớm nhất của điều khiển tự động, nhưng vì nó không có một bộ khuếch đại hoặc độ lợi, cho nên nó thường không được coi là một cơ cấu servo.
Thiết bị điều khiển vị trí phản hồi đầu tiên là động cơ lái tàu, được sử dụng để xác định vị trí bánh lái của những con tàu lớn dựa trên vị trí của vô lăng của con tàu đó. John McFarlane Grey là người tiên phong trong lĩnh vực này. Thiết kế được cấp bằng sáng chế của ông đã được sử dụng trên tàu SS Great Eastern vào năm 1866. Joseph Farcot xứng đáng được nhớ đến với khái niệm phản hồi, với nhiều bằng sáng chế giữa năm 1862 và 1868.
Động cơ tổ hợp (telemotor) được phát minh khoảng năm 1872 bởi Andrew Betts Brown, cho phép tạo ra các cơ cấu giữa phòng điều khiển và động cơ được đơn giản hóa đi rất nhiều. Các động cơ lái hơi nước có những đặc điểm của một cơ cấu servo hiện đại: một đầu vào, một đầu ra, một tín hiệu sai số, và một phương tiện để khuếch đại tín hiệu sai số được sử dụng để phản hồi âm cho việc điều chỉnh sai số tiến tới giá trị zero. Cơ cấu công suất ngược Ragonnet là một bộ khuếch đại servo chạy bằng khí hoặc hơi nước đa mục đích dùng cho chuyển động thẳng được cấp bằng sáng chế vào năm 1909.
Các cơ cấu servo điện được sử dụng sớm nhất vào năm 1888 trong máy truyền điện bằng chữ viết của Elisha Gray.
Các cơ cấu servo điện đòi hỏi một bộ khuếch đại công suất. Thế chiến II đã nhìn thấy sự phát triển của các cơ cấu servo điều khiển hỏa lực điện, sử dụng một amplidyne làm bộ khuếch đại công suất. Các bộ khuếch đại ống chân không được sử dụng trong truyền động ổ băng UNISERVO cho máy tính UNIVAC I. Hải quân Hoàng gia Anh đã bắt đầu thử nghiệm điều khiển công suất từ xa (RPC) trên HMS Champion vào năm 1928 và bắt đầu sử dụng RPC để điều khiển đèn pha rọi máy bay địch trong đầu thập niên 1930. Trong Thế chiến thứ II, RPC đã được sử dụng để điều khiển giá pháo và thiết bị chỉ thị mục tiêu cho pháo.
Cơ cấu servo hiện đại sử dụng các bộ khuếch đại công suất trạng thái rắn, thường được cấu tạo từ MOSFET hoặc thyristor. Các servo nhỏ có thể sử dụng các transistor công suất.
Nguồn gốc của từ này được cho là lấy từ tiếng Pháp “Le Servomoteur” hoặc slavemotor, lần đầu tiên được sử dụng bởi JJL Farcot vào năm 1868 để mô tả động cơ thủy lực và hơi nước được sử dụng trong hệ thống lái tàu thủy.
Loại servo đơn giản nhất sử dụng điều khiển bang-bang. Các hệ thống điều khiển phức tạp hơn sử dụng điều khiển tỷ lệ, điều khiển PID, và điều khiển không gian trạng thái, những điều này được nghiên cứu trong lý thuyết điều khiển hiện đại.
Thông tin liên hệ
TRUNG TÂM TỰ ĐỘNG HÓA CÔNG NGHỆ ALPHA TECH PLC
Hà Nội: Tầng 8, Tòa nhà 169 Nguyễn Ngọc Vũ, Phường Trung Hòa, Quận Cầu Giấy, Hà Nội
SĐT/Zalo: 0988 803 232
Website: https://smartplc.com.vn/
Fanpage: https://www.facebook.com/daotaoplcalphatech
Email: infor.smartplc@gmail.com
Bài viết khác
-
SCADA LÀ GÌ ?
- Ngày đăng: 06-10-2022
- Lượt xem: 528
SCADA là gì? Nó được hiểu theo nghĩa đơn giản là giám sát điều khiển và thu thập dữ liệu. Vậy cụ thể nó hoạt động ra sao? Được ứng dụng vào cuộc sống như thế nào? Hãy cùng tìm hiểu thông qua bài viết dưới đây nhé!
-

HỆ THỐNG GIÁM SÁT ĐIỀU KHIỂN NHÀ MÁY CÙNG VISION PLC
- Ngày đăng: 06-10-2022
- Lượt xem: 562
Hệ thống điều khiển nhà máy là gì? Chúng hoạt động ra sao cùng việc tích hợp PLC diễn ra như thế nào? Thao khảo ngay bài viết bên dưới để được giải quyết trọn vẹn thắc mắc này nhé!
-

LẬP TRÌNH PLC LÀ GÌ ?
- Ngày đăng: 17-05-2021
- Lượt xem: 766
Người sử dụng có thể lập trình để thực hiện một loạt trình tự các sự kiện. Các sự kiện này được kích hoạt bởi tác nhân kích thích (ngõ vào) tác động vào PLC hoặc qua các hoạt động có trễ như thời gian định thì hay các sự kiện được đếm. PLC dùng để thay thế các mạch relay (rơ le) trong thực tế. PLC hoạt động theo phương thức quét các trạng thái trên đầu ra và đầu vào. Khi có sự thay đổi ở đầu vào thì đầu ra sẽ thay đổi theo. Ngôn ngữ lập trình của PLC có thể là Ladder hay State Logic. Hiện nay có nhiều hãng sản xuất ra PLC như INVT, Allen-Bradley,Omron, Honeywell…